Abstract
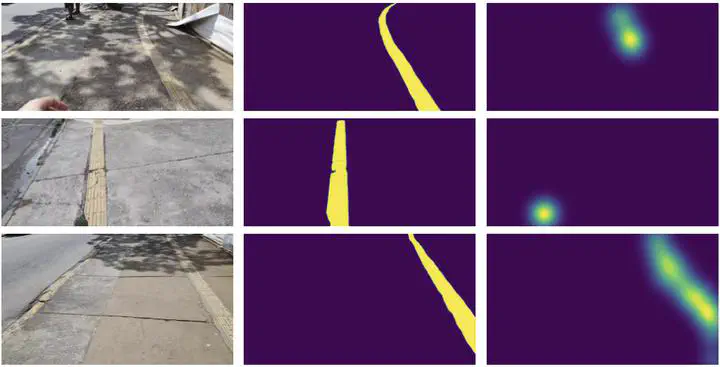
Tactile paving is a structure available on sidewalks that supports visually impaired people in walking independently. Maintaining this and other structures in the urban environment is essential for pedestrians’ safety and well-being. Computational solutions for their assessment, an essential part of urban infrastructure maintainability, require the availability of specific data, which is costly and time-consuming to obtain. In this context, this work proposes using the SAM2 segmentation model as a basis to enhance saliency detection models. These saliency models can then detect important urban features more accurately and with lower costs, making them ideal for deploying on mobile devices. This paper illustrates how this approach can improve the identification of tactile paving to aid the mobility of visually impaired users while also collecting summarized data about the conditions of these structures.